Lecture 23 - Introduction to robot dynamics and Lagrange-Euler method NPTEL-NOC IITM 25:10 3 years ago 12 214 Скачать Далее
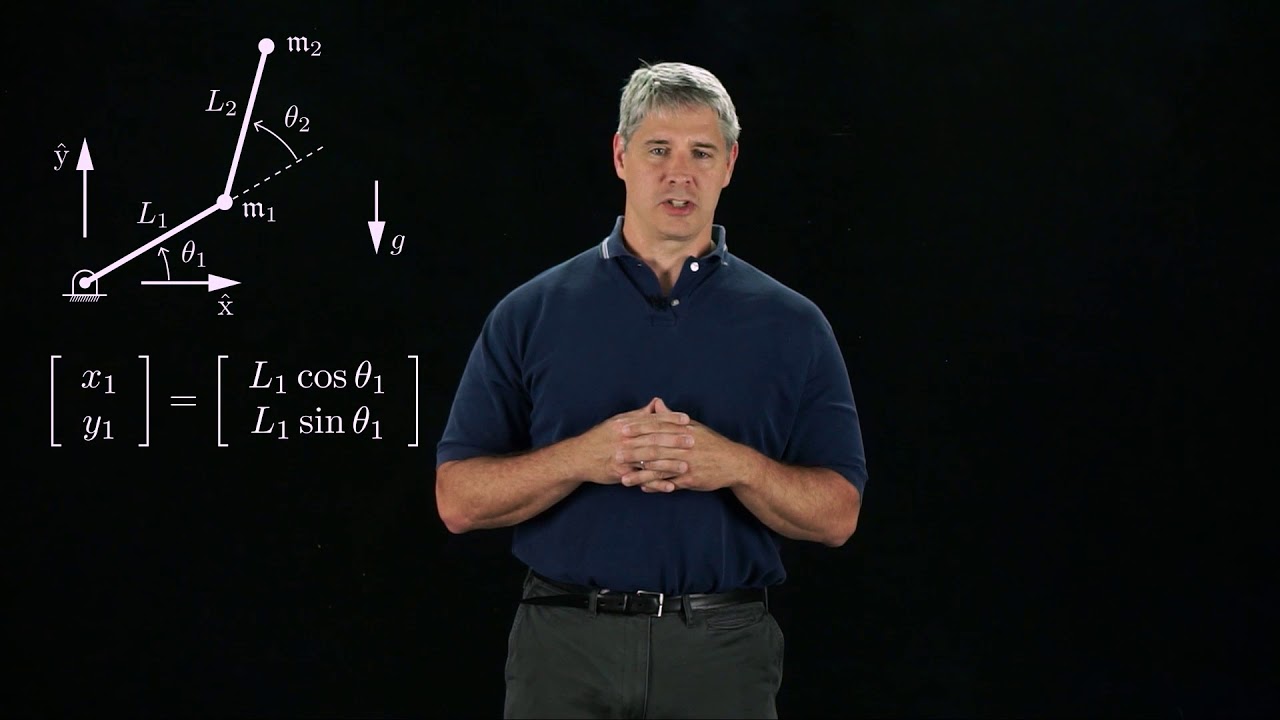
Modern Robotics, Chapter 8.1: Lagrangian Formulation of Dynamics (Part 1 of 2) Northwestern Robotics 6:42 6 years ago 140 030 Скачать Далее
S18 - Robot Dynamics: Euler Lagrange Formulation I ASHISH SINGLA 17:50 3 years ago 10 157 Скачать Далее
Modern Robotics, Chapter 8.3: Newton-Euler Inverse Dynamics Northwestern Robotics 5:53 6 years ago 36 883 Скачать Далее
Dynamics of an Industrial Serial Robot using Lagrange-Euler Approach Arun Dayal Udai 39:44 2 years ago 3 428 Скачать Далее
This chapter closes now, for the next one to begin. 🥂✨.#iitbombay #convocation Anjali Sohal 0:16 2 years ago 2 053 197 Скачать Далее
Robot Dynamics, Part 2: Lagrangian Formulation Mechanical Engineering-Learn faster 15:37 4 years ago 35 297 Скачать Далее
Lagrangian Mechanics (Torques and Forces) | Robotics | Part 5 ThatsEngineering 15:31 4 years ago 22 517 Скачать Далее
Just physics student things #shorts #math #astrophysics Space According to Skylar 0:06 1 year ago 989 397 Скачать Далее